
Todo lo que siempre quiso saber sobre el ERTMS y nunca se atrevió a preguntar por temor a una retahíla de tecnicismos y acrónimos en inglés.
Bueno: los tendré que poner porque son los que aparecen en los documentos y en los medios, pero «entre paréntesis» porque son perfectamente prescindibles.
(Última actualización: 19/03/2024)
¿Para qué sirve el ERTMS?
El ERTMS (European Rail Traffic Management System) es, como su nombre indica, el sistema europeo de gestión del tráfico ferroviario, consecuencia de un proyecto de 1989 con el objetivo de facilitar la interoperabilidad entre las diferentes redes nacionales. Sus especificaciones provienen de la Directiva del Consejo de la Unión Europea 96/48/EC.
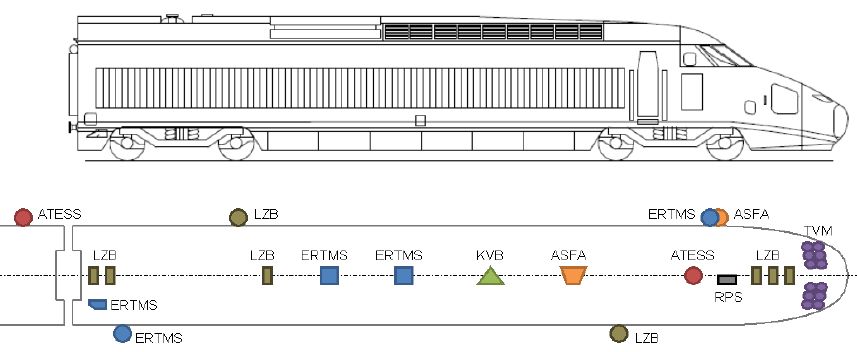
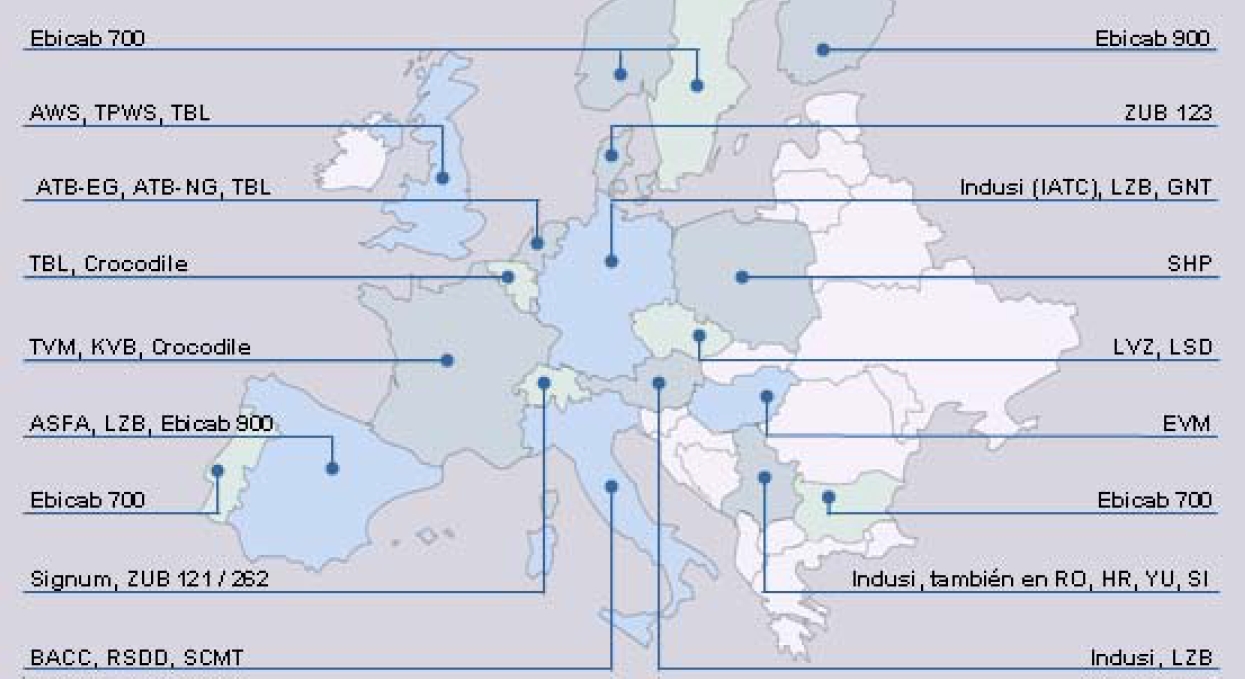
Lo que se pretende es que cualquier tren pueda atravesar Europa con un sistema único y un solo equipamiento a bordo. Por ejemplo: los trenes Thalys París-Colonia (400 km y 4 países, tampoco parece mucho) llevan 7 sistemas de señalización (TVM, KVB, ATB, TBL, TBL2, INDUSI y LZB).
Además, se van quedando obsoletos: en 2021 Euskal Trenbide Sarea (ETS) decidió migrar su sistema Euroloop (similar al LZB) a ETCS 1 (ERTMS). Lo montará Thales.

Funcionamiento básico
En el sistema ASFA (Anuncio de Señales y Frenado Automático), la baliza en tierra informa directamente al equipo de a bordo de la orden de su señal asociada (solo 5 órdenes hasta ahora, 11 con el ASFA Digital, aunque el maquinista dispone de 3 botones para detallar esas órdenes en función de lo que vea en campo), y con esta información obliga al maquinista a realizar determinadas acciones: reconocimiento mediante pulsador, reducción de velocidad antes de un determinado tiempo…

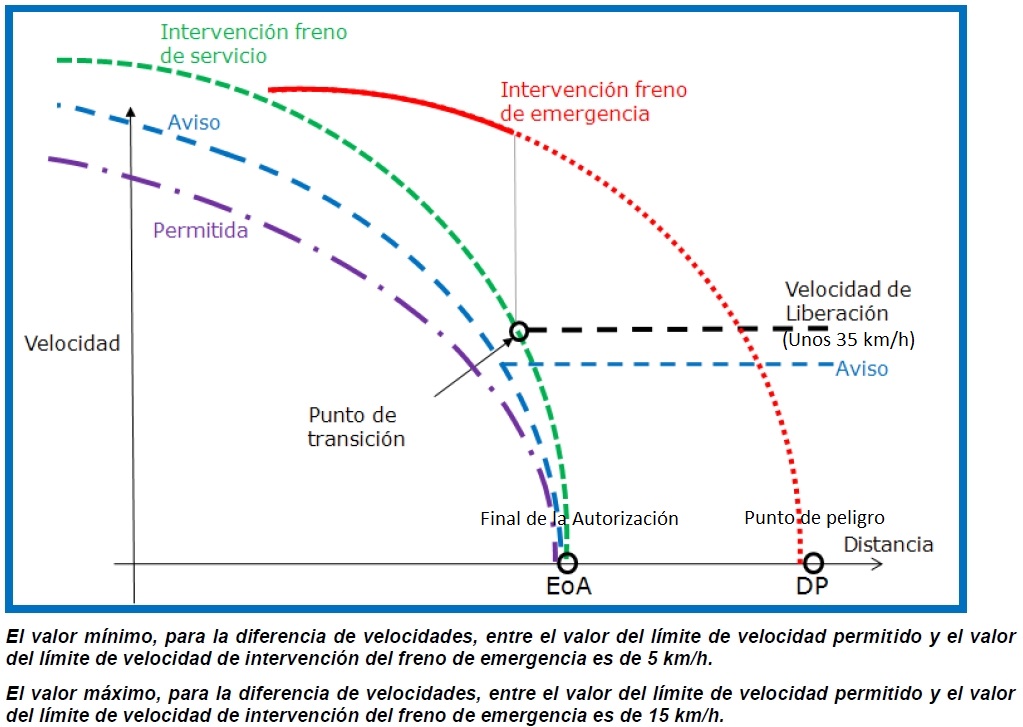
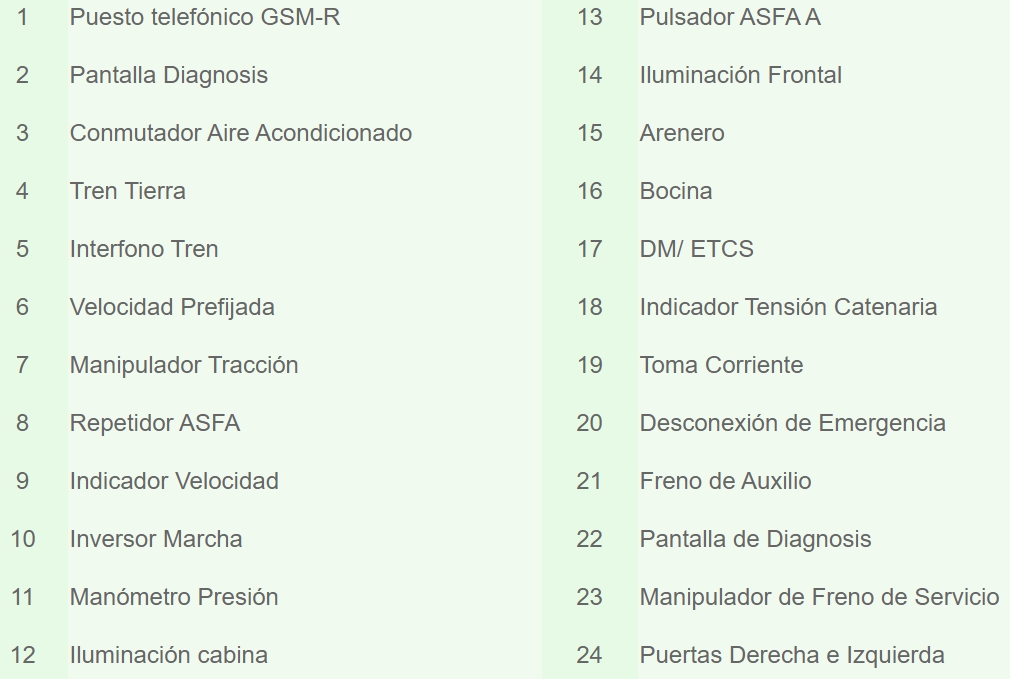
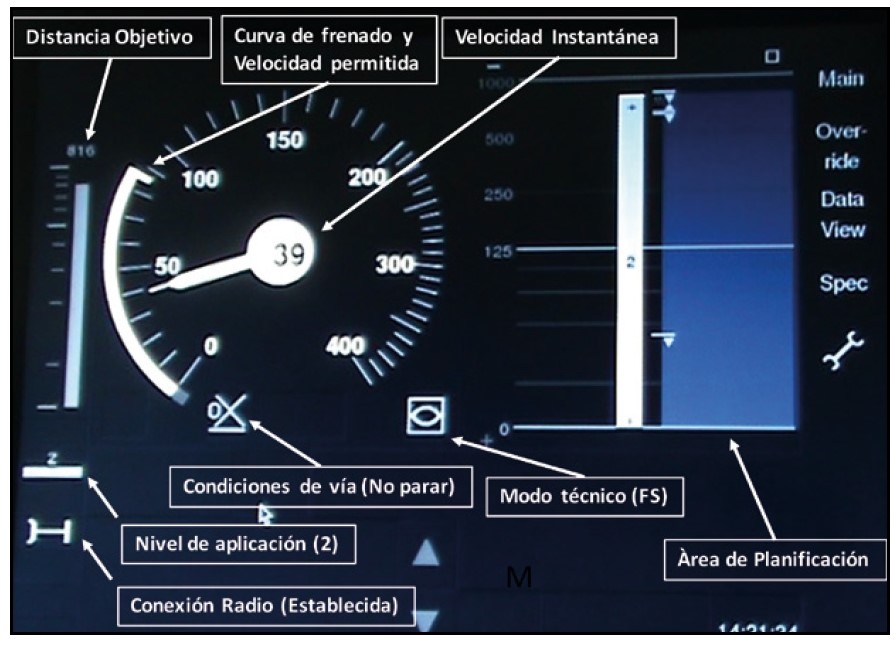
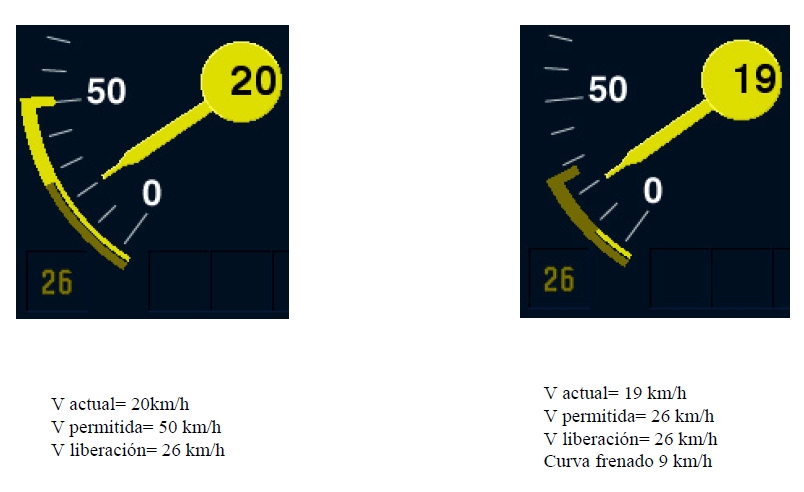
En el ERTMS es el propio sistema el que conoce la situación de la totalidad de la línea (tanto el perfil estático, o SSP, como el dinámico, o DSP: limitaciones, fuerte viento… ) y el que envía Autorizaciones de Movimiento en función del espacio disponible delante del tren (hasta 32 km con ETCS 2). Éstas contienen la velocidad máxima que concede el sistema, la distancia hasta el punto donde termina dicha Autorización (LoA) y la velocidad-meta (de liberación), la máxima en ese punto. Obligan al maquinista a no rebasar la velocidad límite ya que, tras el aviso, el sistema aplicará la velocidad de supervisión, o incluso el frenado de urgencia provocando un descenso brusco de la velocidad (Trip).
Lo mismo, pero en inglés para que suenen los nombres: el sistema envía una MA (Movement Autorithy) con la velocidad máxima, la distancia hasta EoA (End of Authority), y la velocidad máxima final: RS (Release speed).
Teniendo en cuenta la velocidad actual, la distancia y la velocidad final, el sistema establece una curva de frenado.
En modo Supervisión Total (FS, Full Supervisión, el normal) el sistema, en plena vía, hace prácticamente todo: sube y baja la potencia para mantener la velocidad prefijada, cierra herméticamente el tren en los túneles y pasa las zonas neutras o hace el cambio de tensión: debe anular los aparatos de emergencia, cerrar el regulador de tracción, abrir el disyuntor de la tractora, bajar el pantógrafo, seleccionar la nueva tensión, y una vez pasada la zona neutra subir el pantógrafo, cerrar el disyuntor, abrir el regulador de tracción y permitir los aparatos de emergencia. También indica automáticamente el lado por donde deben abrirse las puertas en función de la vía de estacionamiento.
Estos sistemas de conducción (que están evolucionando) dependen sobre todo del Sistema de Control y Gestión de Trenes (TCMS) del fabricante del tren; en el Avril tienen el nuevo REGATO (Regulated Energy Efficient Automatic Train Operation), mientras que CAF tiene el Cosmos.
La conducción automática, además de en ferrocarriles urbanos, existe también en algunos trenes de alta velocidad (TAV). Los CR400AF-C y CR400BF-C chinos tienen conducción semiautomática ATO (Automatic Train Operation) GoA 2. No solo circulan de una forma más suave y homogénea (y relajada para el maquinista, que solo tiene que abrir las puertas), sino que -además- ahorran energía.
Para saber en qué sentido informan las eurobalizas hay que comprobar que la baliza fija (sin cable de alimentación) está antes de la baliza variable (con cable), en el sentido de la marcha.

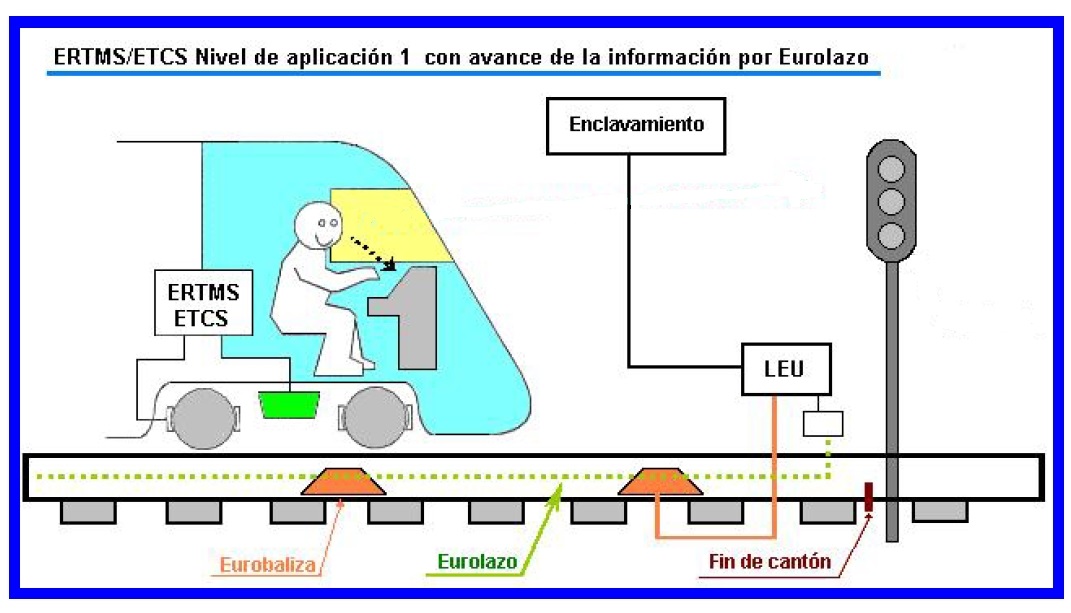
Normalmente se conectan a una Unidad Electrónica en Vía (LEU, Lineside Electronic Unit, a 1.500 metros) que se encarga de indicar a la eurobaliza qué información debe transmitir: el telegrama. Mientras que actuando como transpondedores pasivos, las eurobalizas sólo emiten esos telegramas cuando un tren les ordena hacerlo. De hecho, ni siquiera necesitan alimentación eléctrica: es la antena del propio tren la que, al enviar una potente onda de 27 Mhz, energiza la baliza, alimentándola y obligándole a emitir su información al paso del tren.
¿Qué es el ERTMS?
Hasta la más humilde de las líneas tiene que tener un sistema de seguridad, o bloqueo: desde el Bloqueo Telefónico al Automático. Un sistema de comunicación entre puestos de bloqueo: el Hilo Selectivo, o con los maquinistas: el Tren-Tierra. Y un sistema regulador, o de gestión del tráfico: el SITRA o el Gestor de Rutas y Prioridades (GRP 03) dentro de un Puesto de Mando con o sin Control de Tráfico Centralizado (CTC), que decide las circulaciones con preferencia, o cuándo se puede realizar el mantenimiento.
¿Y cómo se llama el conjunto de bloqueo, comunicaciones y gestión? Circulación. Pues este sistema europeo llamado ERTMS es el conjunto: la Circulación; e integra un sistema de bloqueo con distintos niveles (ETCS, European Train Control System); un sistema de gestión del tráfico (ETML, European Traffic Management Layer, en España el DaVinci); un Centro de Regulación y Control (CRC, equivalente al CTC) y, a veces, se complementa con sistemas de comunicación (GSM-R u otros), o de posicionamiento por satélite (o GNSS, ya sea GPS o Galileo), y otros muchos más.
La palabra clave del acrónimo es «gestión». Así, el ERTMS está formado -de forma integrada- por estas capas ( a veces más, a veces menos), pero no por ello deja de ser ERTMS. Veamos las más importantes.
Subsistema de Control-Mando y Señalización (CMS)
Es el sistema europeo de mando y control de trenes (ETCS, European Train Control System), que se encarga de que la circulación se realice de forma segura, y es el encargado de sustituir a los múltiples sistemas nacionales (y locales) existentes en toda Europa.
Claro que, para que eso sea posible, hay que permitir que se circule solo con el ETCS y que deje de ser obligatorio el sistema de respaldo nacional (en España el ASFA Digital) porque, si no, los trenes seguirán necesitando múltiples sistemas, y lo que se pretende es que solo exista uno.
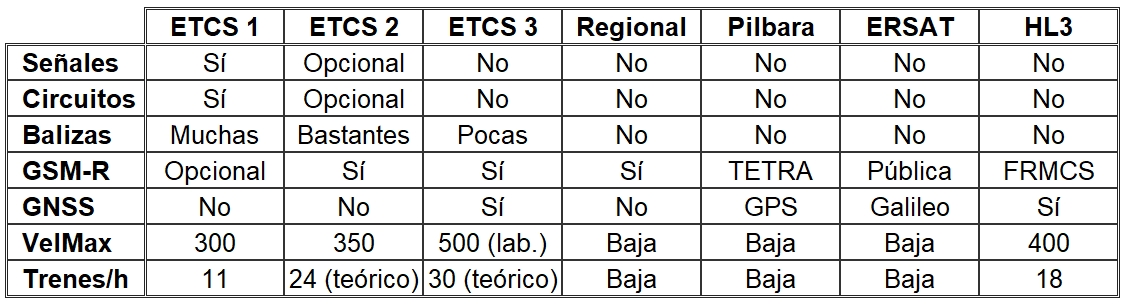
El ETCS tiene 4 niveles (0, 1, 2 y 3), al menos 16 modos técnicos de conducción (desde On Sight hasta Full Supervision) e innumerables versiones de software (SRS, System Requirements Specifications) que se agrupan en torno a estándares, o base de referencia (Baseline).
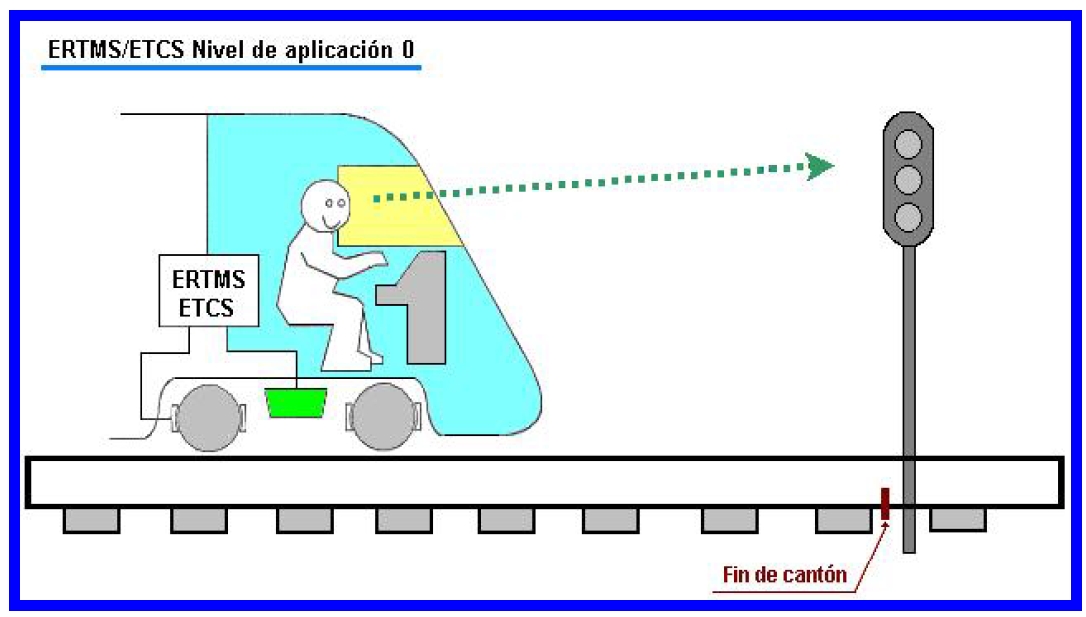
ETCS 0 + ASFA (en España): se emplea cuando se circula hacia una línea equipada. Por ejemplo: al salir de Atocha hacia Barcelona hasta el km 4,276 donde está la primera eurobaliza, que emite un telegrama para la transición entre sistemas. Información puntual (mediante balizas ASFA) y supervisión semicontinua. Un tren cada 8 minutos a una velocidad máxima de 200 km/h.
ETCS 1: información puntual (mediante eurobalizas, y eurolazos, estos últimos adelantan información) y supervisión continua. Necesita señalización lateral solo para situaciones degradadas; en circulación normal solo se atiende al monitor DMI (Interfaz Máquina Conductor). Línea regulada por CRC (Centro de Regulación y Control). Un tren cada 5 minutos y medio a una velocidad máxima de 300 km/h.
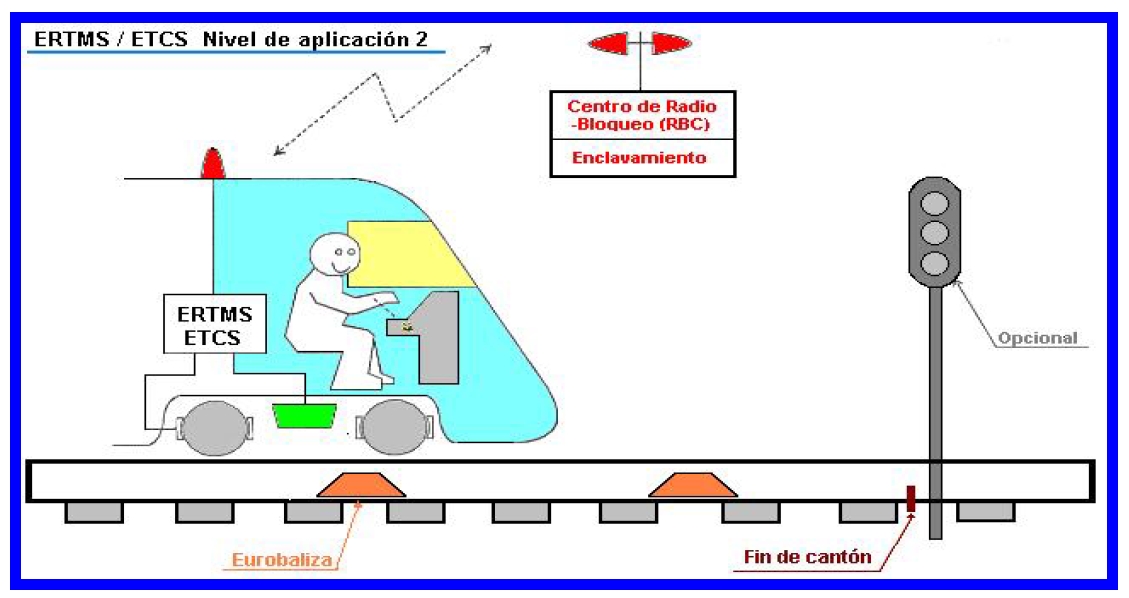
ETCS 2: información continua (mediante GSM-R) y supervisión continua. Línea regulada por RBC (Centro de Bloqueo por Radio, o Radio Block Center). No necesita señalización lateral. Un tren cada 2 minutos y medio a una velocidad máxima de 350 km/h.
ETCS 3: no está basado en los circuitos de vía ni en eurobalizas de relocalización, sino en la situación de cada tren generada por él mismo gracias al GNSS (preferentemente Galileo, o GPS) o incluso el GSM-R. De esta forma cada tren crea su propio cantón móvil (espacio seguro hasta el tren anterior en función de la velocidad de ambos; «cantón» es el tramo de vía en el que normalmente no puede haber más de un tren), que separan dos trenes consecutivos a la mínima distancia (hasta 59 segundos). Las eurobalizas solo actúan como radiofaros, señalando su posición. Teóricamente permite hasta 500 km/h testados en laboratorio.

También hay un nuevo «modo» llamado supervisión limitada (ETCS LS, Limited Supervision), que surge con el estándar de software Baseline 3 (SRS a partir de 3.0.0+) como un sistema de migración de bajo coste desde los sistemas nacionales al ETCS. El LS permite al equipo ETCS en cabina no tener en cuenta algunos datos en comparación con el modo de Supervisión Total (FS). Así, el ETCS sólo se utiliza para controlar las restricciones de seguridad, mientras que la comunicación de una Autorización de Movimiento se deja a los sistemas nacionales. Según los instaladores facilita la transición y cuesta la mitad. Normalmente se está empleando con ETCS 1 y a una velocidad máxima de 160 km/h (al menos en Alemania, también se utiliza en la República Checa y Suiza). En esta última, a partir de 2018 la señalización EuroZUB / EuroSignum basada en eurobaliza se cambiará al nivel 1 supervisión limitada (ETCS 1 LS).
Mientras que, tanto el nivel 1 como el 2 son muy parecidos en cualquier lugar del mundo (lo más reseñable es que, muchas veces, líneas con nivel 1 tienen GSM-R, aunque no sea obligatorio), el nivel 3 -tal y como se diseñó- se puede decir que no existe. Lo que sí que hay son bastantes líneas de poco tráfico y baja velocidad (justo lo contrario del proyecto original) con muy diversos sistemas basados en él (en proyecto o en servicio). Estos sistemas son muy interesantes porque pueden permitir la persistencia de líneas con poco tráfico que -con otros sistemas con alto coste de mantenimiento- serían inviables.
En Suecia está el ERTMS Regional, un proyecto auspiciado por la UE llamado ERTMS Low Cost que consiste en instalar directamente una variante del ETCS 3 (sistema INTERFLO 550 de Bombardier, ahora Alstom). Tiene GSM-R para la transmisión de órdenes y utiliza la odometría del tren para su propia localización. Al no necesitar señalización lateral, balizas, ni circuitos (solo tiene contadores de ejes cuando sea necesario) abarata su coste y su mantenimiento (según la UE un 30%). Además es compatible con el ETCS 3 “normal”.
Ésta es la parte positiva, la negativa es que tiene islas sin cobertura, no cumple con las ETI (Especificaciones Técnicas de Interoperabilidad) europeas, y los cantones son fijos.
El ERTMS Regional entró en servicio comercial el 21/02/2012 en la línea Västerdalsbanan, pero, pese a los planes iniciales, en el resto de líneas suecas se está instalando ETCS 2.
Pero eso no significa que no se esté poniendo, por ejemplo, en algunos países africanos: en Zambia por solo 38.000 € cada km.
En Pilbara (en el noroeste de Australia) Ansaldo STS (ahora Hitachi) está desarrollando un nuevo sistema para la línea minera Roy Hill Iron Ore, de 342 km, con una inversión de solo 118 M € en los sistemas de control, mando y telecomunicaciones. Tiene arquitectura ETCS 2 con balizas móviles virtuales basadas en la posición según el GPS (el primero del mundo basado en GNSS, y además con certificación SIL4). Las comunicaciones y las Autorizaciones de Movimiento se realizan a través del TETRA IP (pese a que en Australia también hay GSM-R), tiene LDS (Location Detection System) en cabeza y cola para asegurar la integridad del tren, un sistema de asistencia al conductor SIL2 (próximamente tendrá ATO, Automatic Train Operation) y ATMS (Advanced Train Management System), un sistema de control de trenes inalámbrico basado en comunicaciones por satélite que reemplazará a la señalización lateral.
No hay que confundir este proyecto con el de su vecino Rio Tinto Iron Ore, llamado AutoHaul, también en Pilbara y también de Ansaldo, pero con ETCS 2 «normal» (con contadores de ejes) aunque sin GSM-R (tienen TETRA IP con 60 estaciones-base y, en caso de fallo, satélites de apoyo). Éste ya está (14/06/2019) completamente automatizado (GoA4 así que es ATO over ERTMS, AoE) y permite hasta 50 trenes sin maquinista -y de hasta 28.000 t cada uno- a lo largo de sus 1.500 km y 42 pasos a nivel.
Ansaldo (Hitachi) terminó en 2019 las pruebas del ERSAT EAV (ERTMS on Satellite-Enabling Application and Validation) en Sardinia (Cerdeña), en el tramo Cagliari-San Gavino, de 50 km. El 24/02/2017 se validó este sistema de arquitectura ETCS 2 con balizas virtuales fijas, pero de solo 50 m de longitud, basadas en la posición según el sistema Galileo con EGNOS (European Geostationary Navigation Overlay Service), un sistema desarrollado por la ESA, la Comisión Europea y Eurocontrol, que está ideado como un complemento para las redes GNSS para proporcionar una mayor precisión y seguridad en las señales, permitiendo que sea inferior a dos metros. Las comunicaciones y las Autorizaciones de Movimiento llegan desde el RBC (Centro de Bloqueo por Radio) a través de la red pública 3G/4G, TETRA y Satcom como alternativa al GSM-R, y también tiene LDS (Location Detection System) para asegurar la integridad del tren.
Como curiosidad, el tren de las pruebas era un Aln 668, de FIAT, como el que estuvo en el Directo de Burgos entre el 21 y 23 de junio de 1976, y en servicio comercial Madrid-Badajoz desde el 3 de julio hasta el 15/10/1977 cuando volvió a Italia.
Durante 2019 se llevaron a cabo pruebas de este proyecto en la línea Almorchón (Badajoz)-Alhondiguilla-Villaviciosa (Córdoba)
El 08/10/2022 Adif licitó un ETCS Regional para líneas secundarias, que se adjudicó en 04/2023 y se probará en la línea de ancho métrico Asunción Universidad-Guardo. Continuará los resultados de Shift2Rail Stream 2 y combinará los sistemas de GNSS (satelital) y otros sensores (hibridación de sensores) para odometría mejorada.
ETCS 3 Híbrido (HL3)
Este nuevo sistema, que se quiere implantar en la HS2 británica a 362 km/h, es especialmente interesante como mejor continuación del proyecto original del ETCS 3.
El HL3 se basa (aunque todavía está sin aprobar por la ERA) en el conjunto de especificaciones de la Baseline 3 Release 2 (B3R2; la más reciente), mantiene cualquier cantón existente (por circuito de vía o por contador de ejes) y además crea cantones virtuales como subsecciones dentro de los cantones heredados. Las ventajas principales son una reducción del coste de instalación en tierra y un mayor rendimiento. Además, en caso de fallo del sistema, la operación no se paraliza porque se mantiene el sistema inicial de respaldo.
Se emplean cantones virtuales porque son mucho más sencillos de manejar por el RBC (Centro de Bloqueo por Radio) y, al ser tan cortos, son similares a los cantones móviles desde el punto de vista operativo.
Para lograr una separación de 3 minutos y 20 segundos (18 trenes por hora) entre trenes a 400 km/h (0,111 km/s) se necesita una distancia de 22,2 km.
El principal ahorro de costes con el HL3 es que -en principio- no hay necesidad de detección de trenes en tierra, sólo sigue siendo necesaria una referencia de la posición del tren mediante GNSS.
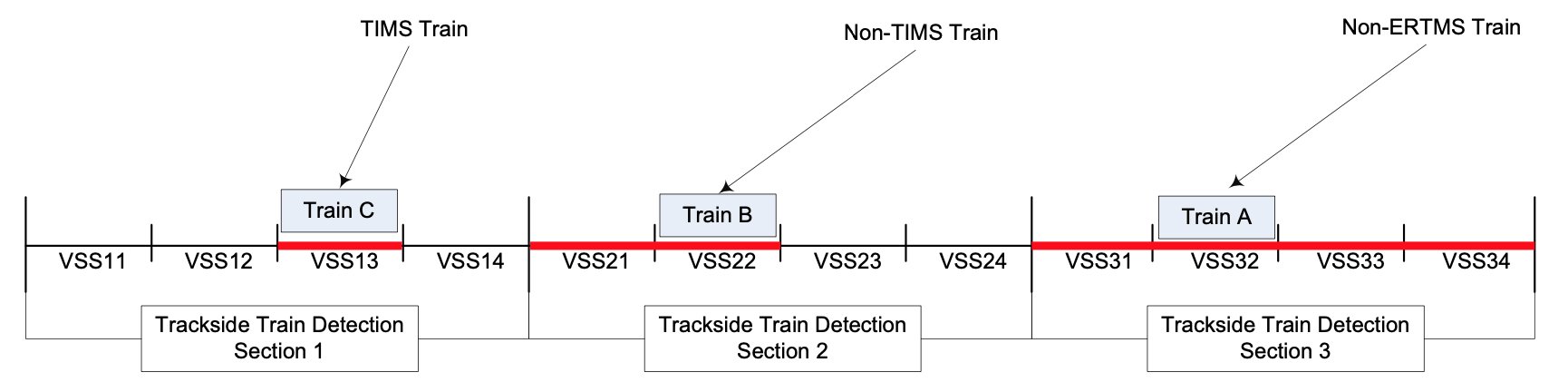
Los trenes necesitarán lo mismo que para el ETCS 2 y, además, un TIMS (Train Integrity Monitoring System, ya incluido en los autopropulsados) para asegurar la integridad.
Los trenes que se desconecten del HL3 no están perdidos, sino que se sabe en qué cantón del sistema heredado se encuentran; el sistema sería más lento de lo normal, pero no se paraliza.
Puede utilizarse en las líneas existentes -que ya están equipadas con sistemas de detección de trenes- para proporcionar una forma barata de aumentar la capacidad de la línea. Durante las horas de menor demanda se podrían programar trenes sin TIMS, por ejemplo, trenes de mercancías.
Frecuencia de trenes con cada sistema
Lo primero que hay que tener en cuenta es la velocidad, no es lo mismo meter trenes en una línea de Cercanías con cantones muy cortos (cantón es el espacio de vía en el que normalmente no puede haber más de un tren) y poca velocidad, que hacerlo en una línea a 300 km/h. Por ejemplo, Mattstetten-Rothrist permite un tren cada 2 minutos a 200 km/h con ETCS 2 y la línea C4 de Madrid permitirá (con ETCS 2) más de 60 trenes simultáneos en 73 km de línea a 160 km/h con una frecuencia de 2 minutos y medio.
La distancia temporal mínima entre dos trenes consecutivos con ASFA a 200 km/h son 8 minutos, con ETCS 1 a 300 km/h son 5 minutos y medio, y con ETCS 2 a 350 km/h cada 2 minutos y medio (los cantones de Madrid-Lleida tienen 1,5 km). Según la Declaración sobre la Red la capacidad de la LAV Madrid-Sevilla con LZB a 300 km/h es de 9 trenes por sentido y hora (cada 6 minutos y medio, hay que tener en cuenta que aquí todavía tenemos la versión L72 cuyo diseño abandonó Siemens en 2012 mientras que en Alemania migraron a L72 CE), y se ha licitado la instalación de ETCS 2 para incrementar la capacidad y regularidad de la línea. También se está instalando en Francia, en la LGV París-Lyon para pasar de los 12 a los 14 trenes por hora (tph) en 2025 y a 16 en 2030 gracias al ETCS 2 migrable a ETCS 3 Híbrido. También se va a instalar en todo el recorrido de los Eurostar. En Alemania (desde 2015) están instalando solo ETCS 2 (sin ningún respaldo) en los nuevos tramos, por ejemplo en los de la VDE 8 Berlín-Múnich (completa con ETCS: 671 km), y han aumentado la financiación para la implantación de ERTMS en toda su red, de 1.700 a 2.700 M €: el objetivo de DB es equipar unos 4.500 km para 2030. En la HS2 británica quieren tener 18 tph con ETCS 3 Híbrido, algo que no existe en ningún lugar, ya que en el Tokaido Shinkansen hay 15 tph a 285 km/h con ATC-NS,; eso sí: el CTCS-3 chino ya fue autorizado para 20 tph a 380 km/h, aunque finalmente nunca se circuló comercialmente a esa velocidad.
Plazos
Calendario previsto para la instalación de ERTMS en cada red nacional:
Luxemburgo (20/07/2017)
Suiza (la mayor parte de la red en ancho estándar, el total en 2025)
Israel (2022, situación en 2022)
Bélgica (2025) (52% de la red prevista a 13/03/2023)
Dinamarca (2023; trasladado a 2030)
Países Bajos (2028; en revisión, pero 100% de la red TEN-T)
Noruega (2034)
Suecia (2035; material en 2029)
Italia (2036 en el mejor escenario)
República Checa (2040)
Irlanda (2040)
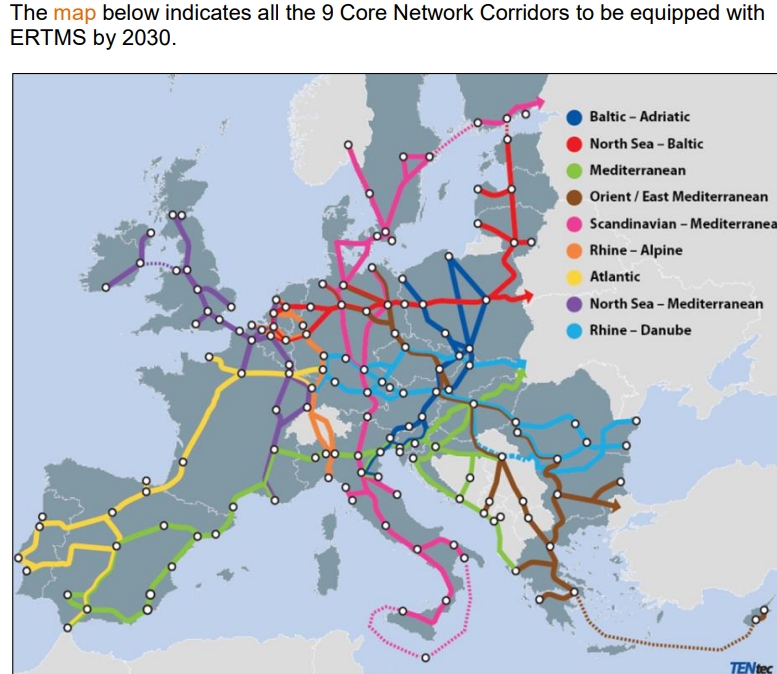
Desarrollo en Europa
En 2016 solo 4.121 km de la Red Básica Europea tenían ERTMS, lo que suponía el 26% del objetivo del Plan de Despliegue Europeo (EDP) para 2023 (15.682 km). En 2017 era el 29% (4.500 km), en 2020 el 38% (5.959 km), en 2021 el 43% (6.713 km) y en 02/2023 el 55% (8.600 km).
La proposición del 14/12/2021 para un European Green Deal incluyó una iniciativa para mejorar el tráfico internacional por ferrocarril consistente en adelantar a 2040 la puesta en servicio del ERTMS en toda la red global europea (119.078 km, la práctica totalidad de los 216.878 km de la red europea), y la eliminación de los sistemas nacionales.
La Red Básica tiene 64.572 km (en 2030), la Red Básica Extendida (por definir, en 2040), la Red Global tiene 119.078 km (en 2050) y el total es de 226.726 km.
Sin embargo, en 09/2021 solo el 14% de la Red Básica estaba equipado (8.103 km), mientras que el 18% (10.533 km) estaba siendo equipado y el 7% (3.783 km) estaba contratado; así que quedaba por adjudicar el 61% (34.751 km) hasta 2030 (57.170 km, con otros 1.886 para más tarde, aunque en 07/2021 la Red Básica se amplió a 59.055 km). La previsión para 2040 es que 80.118 km de los 118.037 km de la red RTE-T estén equipados con ERTMS; si se tienen en cuenta las líneas sin señalización y las excepciones, quedarán 22.070 km sin ERTMS (el 19%).
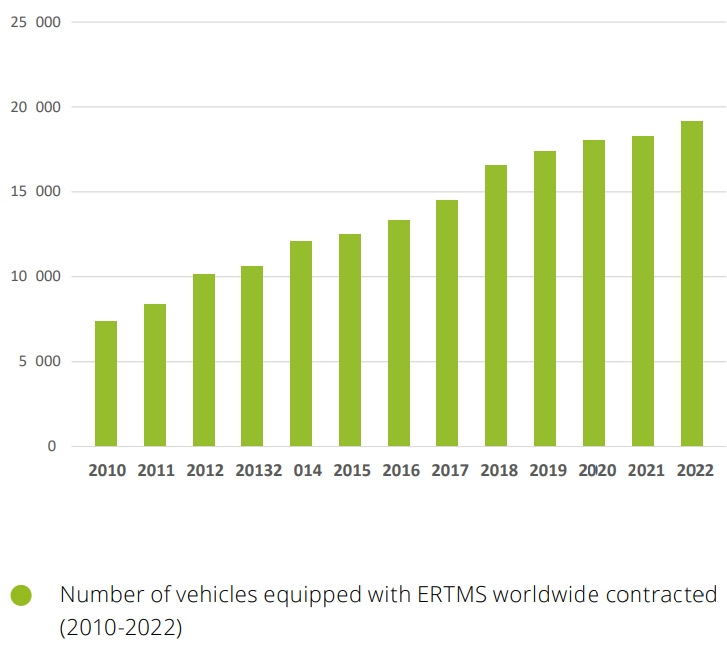
En 03/2023 había 7.539 vehículos equipados con ETCS, el 35% de los que deberían estarlo en 2030 (21.744). En 2021 eran unos 7.000 vehículos (el 17% de la flota ferroviaria comercial: 41.665), mientras que en 2019 eran unos 5.700 vehículos (o 3.563 no está claro), en 2016 eran 2.700 (351 de ellos en España, incluye 112 de Cercanías y 9 locomotoras). Entre 2015 y 2019 entraron en servicio unos 5.000 vehículos nuevos, pero 2.700 de ellos lo hicieron sin ETCS por estar exentos según la ETI. Se esperan 16.000 vehículos equipados en 2030 cuando deberían ser 38.443.
Hay 11 países que prevén tener toda la red equipada para 2040, y tres (Bulgaria, Grecia y Eslovenia) no tendrán necesidad de Clase B a bordo, porque las únicas líneas que no estarán equipadas no tendrán sistemas automáticos de protección de trenes. Alemania, Bélgica, la República Checa y Eslovenia (en la Red Central) planean el desmantelamiento gradual de Clase B en vía (en 2025), y Dinamarca, Finlandia y Suecia están planeando el desmantelamiento tan pronto como se instale el ERTMS.
En cuanto al despliegue de GSM-R, en 02/2023 hay 36.025 km equipados con GSM-R (61%) y otros 7.388 km ya están contratados (13%).
Despliegue por corredores y países en la web de la Comisión Europea.
Estado por corredores y países en la web de la Comisión Europea.
Desarrollo en el mundo
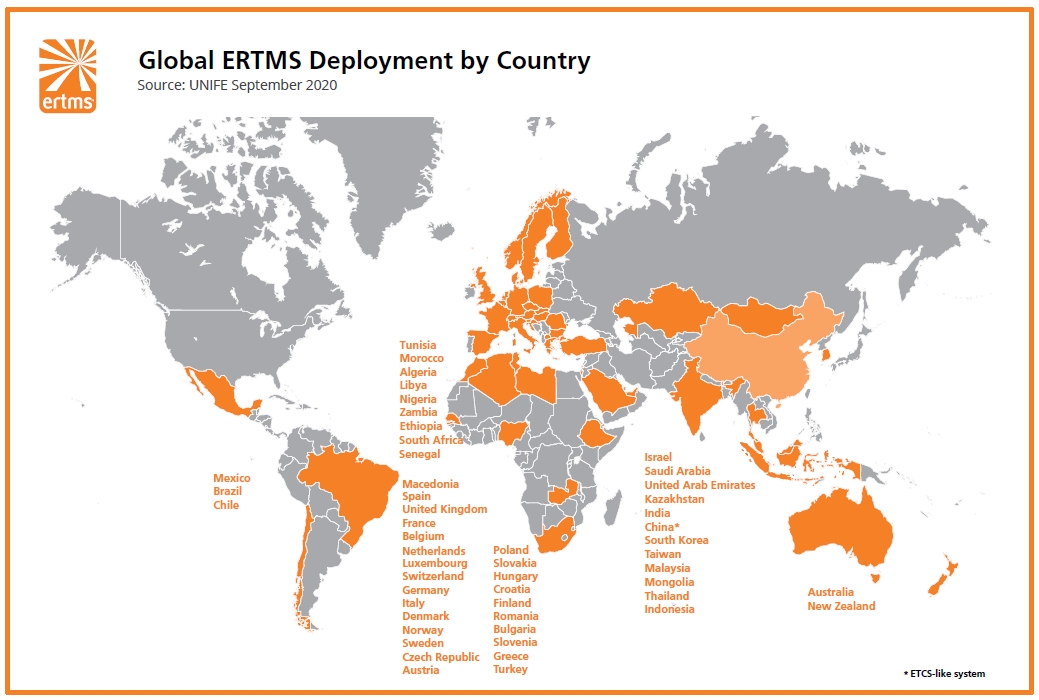
El ERTMS es el estándar mundial, excepto en Japón (con varias versiones de su ATC) y China, donde empezaron instalando ERTMS de fabricantes europeos (1.736 km en 2008), pero pronto desarrollaron “su” sistema CTCS (Chinese Train Control System): el nivel 2 es equivalente al ETCS 1, y el CTCS 3, parecido al N2. Y no es algo propio de la alta velocidad, sino de todo tipo de líneas (de mercancías en Arabia y en todo África), de Cercanías (por ejemplo en India, hasta con HL3 y LTE), y será lo que se instale en las LAV norteamericanas. En 2019 solo había 4.400 km instalados en Europa (2.241 de ellos en España), pero 88.000 km y 120.000 vehículos fuera de Europa (según EIM, aunque según Railway-technology eran 105.185 km y 13.219 vehículos en 2019; a veces cuentan los km de vía [por 2 en vía doble] y dos equipos en cada vehículo), siendo el sistema estándar en 51 países.
Estadísticas mundiales sobre km y vehículos con ERTMS en servicio o contratado.
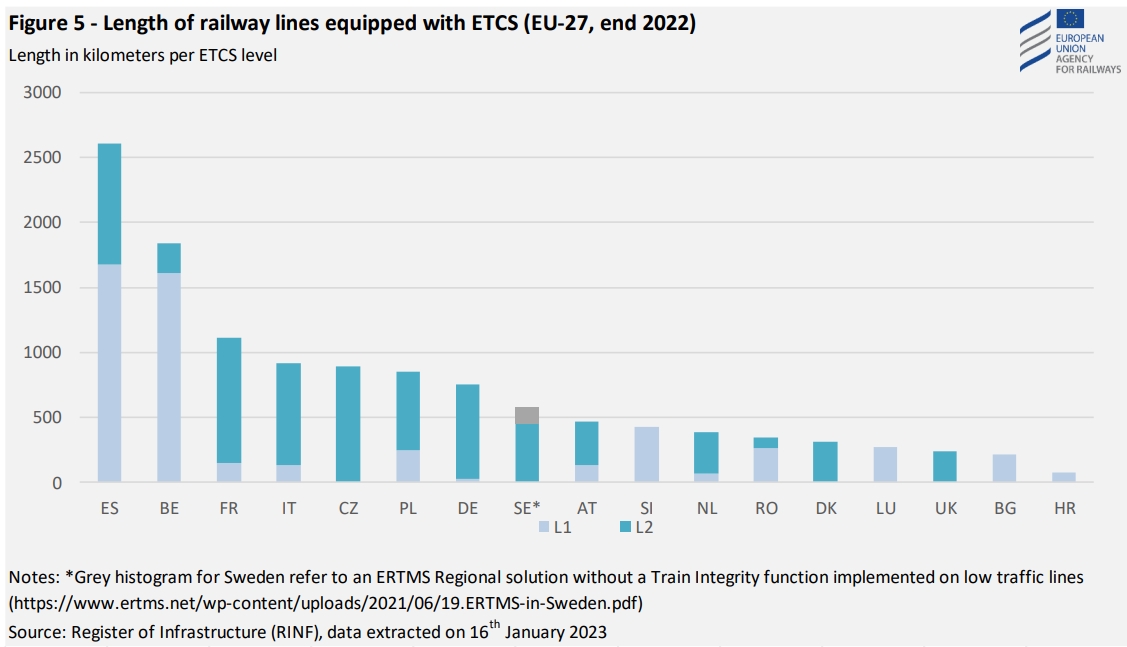
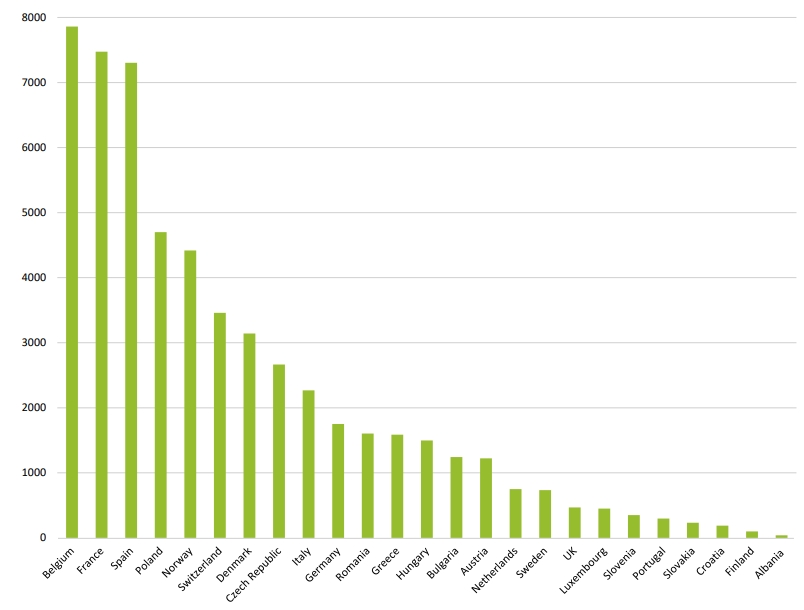
Longitud en cada país europeo a 31/12/2022.
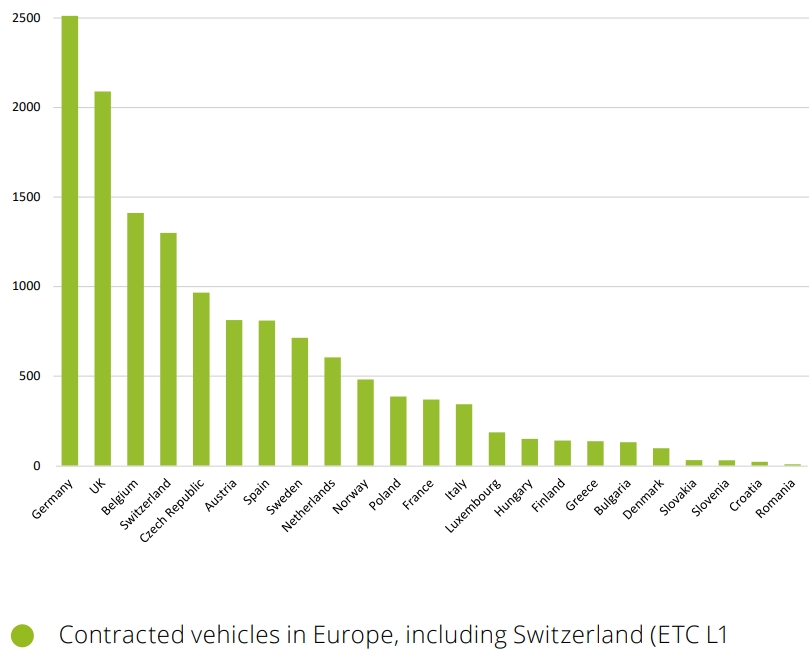
Vehículos y km contratados en el mundo y por países (2022).

Cuando se instala ERTMS sobre el sistema actual (en España normalmente sobre Bloqueo Automático con ASFA) se gana capacidad en función del nivel. Si se instala ETCS 1 la capacidad es algo mayor, esto se debe a que el sistema sabe la situación de todos los trenes (puede enviar una Autorización de Movimiento hasta 5 señales después), y no solo que el siguiente cantón está libre, lo que aumenta la velocidad -por ejemplo- en Cercanías, con cantones cortos. También optimiza y delimita más exactamente las curvas de frenado, por lo que se puede circular más deprisa hasta más cerca del punto de reducción de velocidad. De Atocha a Méndez Álvaro a 90 km/h con ETCS 1 (a 70 para los no equipados), de Atocha a Entrevías 110 (80), y así algunas más. Esto se debe a que se priorizó la capacidad sobre la velocidad y, circulando con ASFA, la velocidad está limitada por la distancia de frenado desde que se ve una señal en anuncio de parada hasta la siguiente. En los túneles de Barcelona se pasará de 20 a 24 trenes por hora (de 3 a 2,5 minutos).
Si se instala ETCS 2 -además de la comunicación continua (el cambio de la situación es instantáneo, y no hace falta acercarse a una señal para saber qué ordena), se pueden poner señales virtuales (una señal «tipo tráfico» de chapa con una eurobaliza fija para relocalización: muy baratas). Las nuevas líneas con ETCS 2 desde el inicio (en otras se puso sobre el existente nivel 1) suelen tener circuitos de vía solo en las estaciones (por eso no cambian a rojo las señales avanzadas al pasar un tren, sino que continúan en verde hasta que éste llega a la estación), mientras que en los trayectos solo hay contadores de ejes; después se ponen tantas señales virtuales como cantones se quieran. La secuencia es la siguiente: cuando el primer tren circula entre la estación y la señal virtual, la señal de salida está en rojo, cuando rebasa la señal virtual (la eurobaliza informa al tren de su posición y éste al RBC) se enciende el foco azul fijo (junto con el rojo, parada selectiva, figura FF7C) y solo puede salir un tren con N2 y, cuando pasa el primer contador de ejes (estación, PCA o PBA), la señal pasa a verde.
Comunicaciones
El sistema europeo es el GSM-R, o Global System for Mobile Communications–Rail (way), que está definido por las especificaciones EIRENE (European Integrated Railway Radio Enhanced Network) que garantizan su uso sin pérdidas, y MORANE (Mobile Radio for Railways Network in Europe). Es el subsistema del ERTMS específico para comunicación y aplicaciones ferroviarias, tanto para voz como para datos; pero no es imprescindible, ya que hay líneas donde tienen otro sistema.
En el año 2000 en Europa había más de 35 sistemas distintos de comunicaciones, así que la Comisión Europea creó en 1997 su propio estándar que, ante la ausencia de otro, se está convirtiendo rápidamente en el estándar mundial. Está instalado en más de 150.000 km en Europa y 250.000 km en todo el mundo. La primera red nacional completa con GSM-R fue la de Países Bajos, con algo menos de 3.000 km (01/01/2007); el sistema analógico Telerail fue desinstalado. Otros países han sido Noruega (3.000 km, en 2007) y Suecia (8.500 km, en 2008), mientras que Reino Unido lo hará en breve; Alemania (73% en 2015) e Italia (59% en 2015) están en ello.
En España está en casi todas las LAV (pero no en Huesca, en el Eje Atlántico ni en la variante de Vandellós desde los cambiadores hacia el sur). En cuanto a líneas convencionales está en el tramo de ancho mixto Bifurcación Mollet-Morrot (21/12/2010, 45 km), en la C4 de Madrid (Colmenar Viejo-Parla por Sol, y ramal Alcobendas-Cantoblanco, 01/03/2012, 66 km), en las Cercanías de Bilbao (Bilbao-Orduña, Bilbao-Santurtzi y Muskiz-Barakaldo, 21/05/2012, 67 km), en Santander-Reinosa (03/12/2012, 88 km) , en Humanes-Monfragüe (07/10/2021, 230 km), que conecta con la LAV Plasencia-Badajoz (195 km), que también tiene GSM-R, y hasta en la red tranviaria utilizada por el tren-tram de Cádiz (26/10/2022, 14 km). He calculado que son 3.802,1 km. Próximamente estará en la R1 de Barcelona, en la C3 Aranjuez-Villalba (para que todas las circulaciones del túnel de Sol lo lleven). En los años 2020/2022 se ha licitado o adjudicado su instalación en Lleida-Manresa, Torralba-Soria, Bif. Aranda-Aranda de Duero, Utiel-Buñol, Bobadilla-Ronda, León-La Robla, Ávila-Salamanca, Bif. Utrera-Fuente de Piedra, Zafra-Los Rosales, Zafra-Huelva M, Zafra-Llano de la Granja y Brazatortas-Villanueva de la Serena, entre otras.
Es el único sistema de comunicaciones de Clase A, es decir: que cumple con las ETI (Especificaciones Técnicas de Interoperabilidad) al igual que el ETCS. Eso significa que, a medio plazo, será el único sistema de comunicaciones en el ámbito ferroviario… si no se hubiera quedado obsoleto. Tiene arquitectura 2G y sigue en la Baseline 1 así que Dinamarca está instalando GPRS (2,5G) y Corea tiene LTE-R (4G) desde 11/2023.
En 01/2023 España solicitó la no instalación de GSM-R en la línea Cáceres-Valencia de Alcántara por su alto coste. A cambio, instalará BLAU con CTC y «un nuevo sistema de comunicación basado en sistemas de comunicación por satélite y GSM (comerciales)» entre el maquinista y el CTC.
Hay que desarrollar rápido el FRMCS (Future Railway Mobile Communication System), que está basado en 5G, o esto volverá a ser Babel (se espera que sustituya al GSM-R en 2035). Emitirá a 1900 MHz y a 900 MHz como el GSM-R para funcionar en paralelo: el RBC (Radio Block Center) emite ondas de radio en la banda de los 918 a 925 Mhz que el tren recibe directamente, y éste utiliza las frecuencias que van de los 873 a 880 Mhz.
Facilitará aplicaciones como el ETCS 3; la conducción automática (ATO, Automatic Train Operation), el acoplamiento virtual, el mantenimiento inteligente, la supervisión de los componentes en tierra y las conexiones directas entre los trenes y los sistemas de gestión del tráfico (ETML): llamadas de voz para grupos y llamadas de emergencia. El proyecto Horizonte 2020 ICT-053 5GRAIL desarrollará los primeros prototipos con un proyecto de 13 M € y 30 meses de duración, cuyos trabajos comenzaron el 01/11/2020. El objetivo de la UIC es tener una primera edición de FRMCS basada en 5G (3GPP Release 17) en 2025.
Sin embargo, la primera prueba se realizará en Finlandia en el 2022 junto con la instalación de un tramo con ETCS 2 que debería estar en servicio a primeros de 2023 (programa finlandés); el primer tramo con FRMCS en servicio está en Mozambique.
En 09/2023 Evo-rail desplegó su wifi 5G con tecnología mmWave (rail-5G dentro del programa 5GMED) en la línea de alta velocidad Llers-Figueras-Perpiñán (LFP).
Otros sistemas
La lista es interminable y -además- aumenta cada día. Muchos de ellos están integrados en DaVinci, el sistema español de gestión del tráfico (ETML) presente en, entre otros: Red de Alta Velocidad, Red Convencional, RAM, Metro de Londres, Arabia Saudita, Lituania, Marruecos o Venezuela. Por citar los más importantes:
-Sistemas de Información al Viajero (SIV).
-CDS (Concentrador de Detectores de Seguridad) y TSAD (Telemando de Sistemas Auxiliares de Detección).
-Detectores de Caída de Objetos (DCO) en pasos superiores.
-Detectores de Vientos Laterales (DVL).
-Supervisión, Control y Adquisición de Datos (SCDA) que gestiona el telemando eléctrico y las alertas por cortes en el suministro eléctrico, ya sea en catenaria o en túneles.
-Entorno operativo de planificación de capacidad (PLANIF): creación de las marchas dentro de MALLAS, Gestión de Marchas (SGM), Gestión de Circulación (SGR) y Enrutador (ART).
-Gestión de Material Rodante (SGMR) y Gestión de Trenes (GTRENES).
-Entorno: Gestión de Usuarios (SGU) y Despacho Integrado de Comunicaciones (DICOM).
-Centros de Protección Civil y Seguridad (CPS) control de los edificios, cámaras y túneles.
-Entornos de no tiempo real: Reconstrucción («Moviola»).
-Monitorización remota (SGR Globa).
-Sistema de Ayuda al Mantenimiento ERTMS (SAM-R).
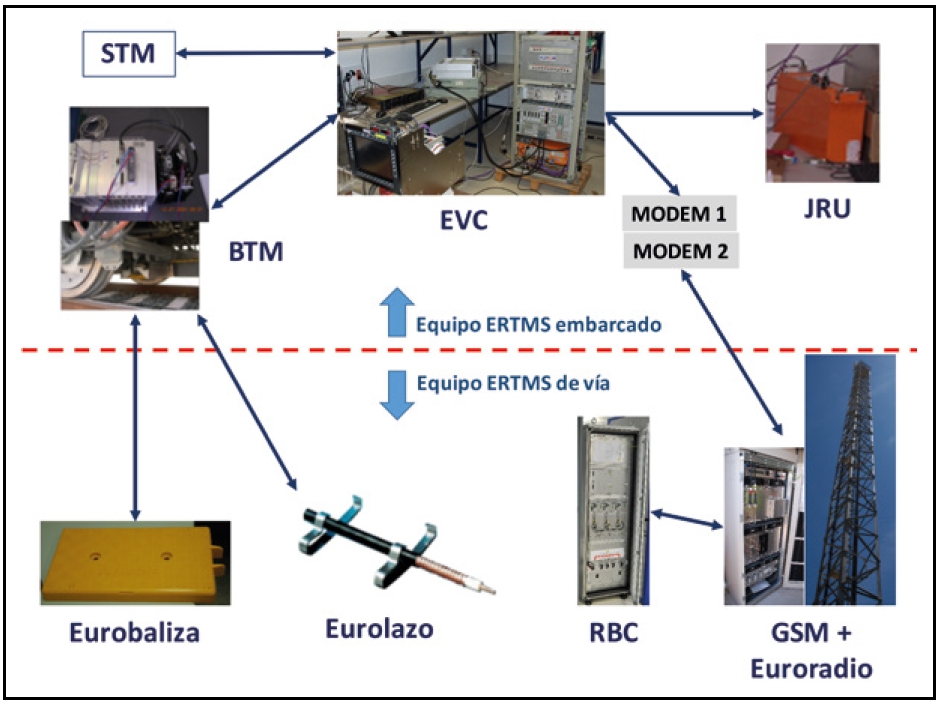
Equipos en los trenes
Las diferencias entre niveles en el equipamiento de los trenes son mucho menores. Todos tienen que llevar el equipo ETCS embarcado: el EVC (European Vital Computer), el Interfaz Máquina Conductor, o DMI, y el de conexión y mando sobre el Sistema de Control y Gestión de Trenes (TCMS) del fabricante del tren. Con ETCS 2 también hay que tener un terminal y una antena GSM-R, y con el ETCS 3 -además- un sistema que asegure la longitud y la integridad de la composición del tren (TIMS, Train Integrity Monitoring System): en los TAV basta con conectar el bus del TCMS del tren al TIMS, mientras que los de mercancías necesitan dos LDS (Location Detection System) en la locomotora y en cola y, si la posición se basa en GNSS: GPS o Galileo.
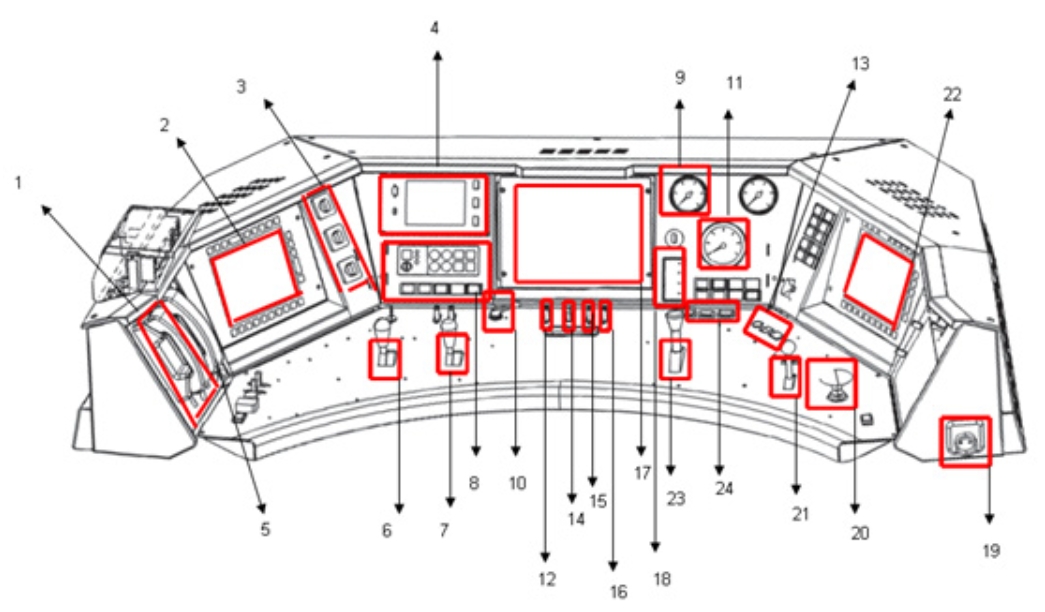
Eurocabina
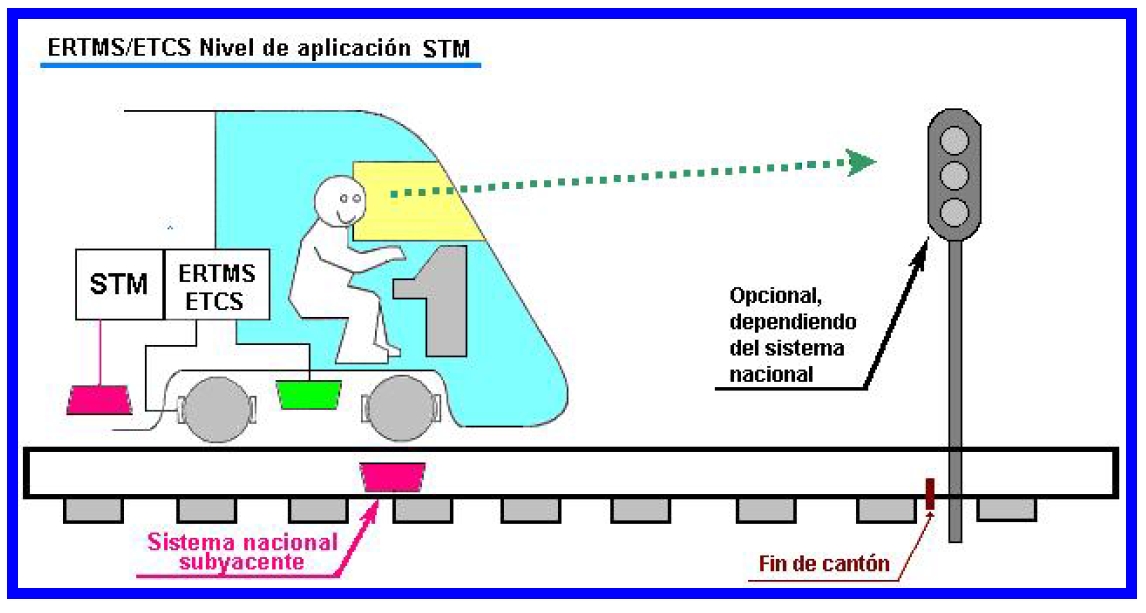
El objetivo es conseguir cabinas similares en todos los vehículos, donde el maquinista tenga todos los sistemas de seguridad y control (de existir alguno nacional) en una sola pantalla, el DMI.
Para traducir los sistemas nacionales se utilizan los STM (Specific Transmission Module o Módulo de Transmisión Específico) que permite circular, con control desde el DMI, por líneas no equipadas con ERTMS, pero sí con sistemas de seguridad nacionales (en España: ASFA, LZB o Ebicab). Los trenes con ETCS de Hitachi Rail (Ansaldo, S-120 y 121 hasta 06/2023) y de Alstom (S-100/104/114) llevan equipos LZB independientes, algo que no gusta a la ERA, que prefiere los STM.
Como no podía ser de otra manera, la eurocabina tiene que estar conectada a la multitud de sistemas embarcados dependientes del ERTMS.
-El EVC (European Vital Computer) es el corazón del sistema ETCS. Es un conjunto de procesadores que recibe toda la información exterior e interior (de los sensores instalados a bordo), se encarga de procesarla y da las instrucciones pertinentes (supervisión y del control de la velocidad de la circulación, curvas de frenado, freno de emergencia, generación de alarmas… ). La información relevante se representa en el DMI para la atención del maquinista.
-DMI (Driver Machine Interface): muestra indicaciones, información y actuaciones del maquinista. Redundado con un DDU (Driver Display Unit) de apoyo.
-Sistema BTM (Balisse Transmision Module): sirve para la lectura de eurobalizas de información instaladas en vía.
-Módulo de comunicaciones GSM-R: integrador de recursos de comunicaciones para transmisión de datos con equipos de tierra (otros GSM-R y con el RBC en ETCS nivel 2).
-Módulo TIU (Train Interface Unit): permite acceder al sistema a los servicios y funcionalidades del tren (freno de emergencia, freno de servicio, estado de puertas, etc.).
-Módulo de control odométrico: integrador de medios técnicos diversos y redundantes para cálculo seguro de velocidad de circulación: generadores de pulsos, radares doppler, acelerómetros…
-KMC (Key Management Centre), es el centro de gestión del sistema de encriptación de las comunicaciones ETCS entre tierra, RBC (Centro de Bloqueo por Radio) y tren, vía GSM-R.
-La unidad de grabación jurídica (JRU, Juridical Recording Unit) es obligatoria y ha de estar certificada por un organismo autorizado.
Modos técnicos de conducción
El sistema no funciona siempre la de la misma forma, depende de si tiene todos los datos cargados, o de si es una situación degradada; pero no del nivel de ETCS.
-Full Supervision (FS) Supervisión Total: es el modo de conducción normal. El sistema supervisa todo y realiza más o menos funciones según el Sistema de Control y Gestión de Trenes (TCMS) del fabricante del tren.
-Staff Responsible (SR) Responsabilidad del Conductor: el sistema supervisa las señales, no las curvas de frenado. Hasta 100 km/h.
-On Sight (OS) Marcha a la Vista o a vía ocupada. Hasta 50 km/h.
-Shunting (SH) Maniobras, con lista de balizas esperadas. Hasta 50 km/h.
-System Failure (SF) Fallo en sistema: algún componente no se ajusta a lo especificado.
-No Power (NP) Sin tracción.
-Stand by (SB) Conexión: para introducción de datos y auto-test.
-Sleeping (SL) Apagado; también para control remoto.
-STM National (SN) Specific Transmisión Module (STM): módulo traductor de otro sistema nacional (ASFA, LZB, Ebicab), o europeo (SE). También: KVB francés para los S-100F.
-Unfitted (UN) en líneas sin ETCS; se circula en Nivel 0.
-Trip (TR) Detención Automática: por actuación anómala del maquinista o del sistema (principio de Fail-Safe).
-Post Trip (PT) Marcha Restringida: hasta recibir otra Autorización de Movimiento (MA).
-Isolation (IS) Aísla al tren del sistema para que no se detenga por una avería.
-Reversing (RV) Área donde el sistema permite ir marcha atrás.
-Non Leading (NL) Acoplado con Tracción Múltiple sin Mando Múltiple (con otro maquinista).
Un poco de historia
El concepto de un sistema único de señalización de la Unión Europea, destinado a aumentar la interoperabilidad, se remonta a 1989 cuando el sector ferroviario y la Comisión emprendieron un análisis de cuestiones relacionadas con la señalización ferroviaria en todos los Estados miembros de la Unión.
Los primeros actos legislativos orientados a perseguir este objetivo se emitieron en 1996 con la «Directiva de interoperabilidad» relativa a un sistema ferroviario de alta velocidad (Directiva 96/48/CE), y en 2001 con la relativa al sistema convencional (Directiva 2001/16/CE).
En 2004 se creó la Agencia Ferroviaria de la Unión Europea (ERA) (Reglamento CE n.º 881/2004) con el objetivo de elaborar las Especificaciones Técnicas de Interoperabilidad (ETI, TSI en inglés). En 2005 se designó un coordinador europeo para el ERTMS (Decisión nº C (2005) 2754). Entre 2005 y 2016 la Comisión (y la ERA desde 2008) firmaron cuatro memorandos de entendimiento con las partes interesadas del sector ferroviario (2005, 2008, 2012 y 2016) con el propósito de intensificar la cooperación y acelerar el despliegue del ERTMS. En 2009 sobre la base de la información facilitada por los Estados miembros, la Comisión aprobó un Plan de despliegue europeo del ERTMS (Reglamento (UE) n.º 1315/2013).
Proyecto EMSET en España
A principios de los noventa, Egidio Leonardi fue comisionado con plenos poderes por la DG TREN (Directorate-General for Transport and Energy) de la CE, para la consolidación de la interoperabilidad de la red europea de transporte ferroviario. Decidió acabar con el trabajo de especificación teórico, y para ello lanzó un proyecto dentro del 4º Programa Marco cuyo objetivo sería la demostración a escala real de la viabilidad de la Interoperabilidad Ferroviaria gracias al despliegue del sistema ERTMS.
España ofreció su LAV Madrid-Sevilla para llevar a cabo la demostración experimental de esta viabilidad. Para ello habilitó un tramo de 40 km entre las estaciones de La Sagra y Mora, y asignó los laboratorios del Servicio de Técnicas Físicas al proyecto EMSET (Eurocab Madrid-Seville European Test). Este proyecto se llevó a cabo entre 1994 y 2000 en el marco de los proyectos ferroviarios emprendidos por el Grupo de Usuarios ERTMS en Bruselas (2001/2007).
EMSET involucró a toda la industria europea de señalización (agrupada en Eurosig, ahora UNISIG), los principales Gestores de Infraestructura Ferroviaria (Agrupados en el ERTMS User’s Group, EUG, incluyendo a Suiza pero no a Francia -entonces- ahora sí), y los laboratorios de ensayo previo (el Centro de Estudios y Experimentación de Obras Públicas CEDEX liderado por el Dr. Jaime Tamarit, y el DLR, ligado a la universidad alemana de Braunschweig).
Las reglas operacionales definidas se ensayaron en las instalaciones de Renfe para formación de maquinistas en Delicias. Este simulador, con una cabina equipada con el sistema ERTMS, fue solicitado por las administraciones de Alemania y Países Bajos. Esta instalación se utilizó en una primera fase de la armonización de las curvas de frenado, que hoy ya están incorporadas a la Baseline 3 junto con la especificación del DMI (el equipo operado por el maquinista).
También hubo otra línea de pruebas con ETCS 1 y 2 entre Albacete y La Encina (90 km, en 2004) para 220 km/h: para esta línea Invensys-Dimetronic equipó a los 10 trenes S-490.
Primeras líneas equipadas
Pese a que hay fuentes que hablan de otras líneas anteriores, no encontré información fiable de que esos planes finalmente se cumpliesen; por ejemplo: se habla de Zaragoza-Huesca, que se adjudicó en el 2000 para 12/2004 pero finalmente no se instaló; nunca.
La primera línea en servicio comercial con ERTMS fue Roma-Nápoles (19/12/2005). Además, con ETCS 2 y sin señalización de respaldo. En España, en Madrid-Lleida (24/10/2011).
El primer ETCS 1 del mundo fue el 19/05/2006 en Madrid-Lleida (en la línea suiza Mattstetten-Rothrist empezó el 18/03/2007 tras múltiples retrasos, y Viena-Budapest en 2008).
En España
En España tienen equipos ETCS todos los trenes de alta velocidad (TAV), los Civia de Madrid y bastantes de Barcelona, los S-450, los S-446 de Madrid sin LZB, y se está instalando en los 447 de Rodalies (77 a 31/12/2020); también lo tienen las locomotoras S-252F (éstas solo ETCS 1).
Versiones de software embarcado (2018, adjudicado / en instalación):
S-100 Alstom 2.3.0.d (SRS, versión de software)
S-102/112 Siemens (2.3.0.d) 2.2.2+ CR (Conventional Rail)
S-103 Siemens (2.3.0.d) 2.2.2+ CR
S-104 Alstom 3.4.0 (primer vehículo con Baseline 3 en España, 11/2020) (ex2.3.0.d, ex2.2.2+)
S-114 Alstom 3.4.0 (ex2.3.0.d-)
S-120/121 Siemens 3.6.0 con ETCS 2 (exHitachi Rail/Ansaldo 2.2.2+ CR solo ETCS 1)
S-130/730 Alstom (Bombardier) 3.1.1.2 (ex 3.1.0.1 ex 2.3.0.d-)
123 S-465: Alstom 2.3.0.d
20 S-450: Siemens (Invensys-Dimetronic) 2.3.0.d
31 S-446: Siemens (Invensys-Dimetronic) 2.3.0.d
77 S-447: Siemens (Invensys-Dimetronic) (Siemens Baseline 3) 2.3.0.d
9 locomotoras S-252: Siemens 2.2.2+ CR (solo con ETCS 1) y 34 S-252 (9 + 9 en estándar y 16 en ibérico): Alstom Baseline 3
28 locomotoras S-253 Alstom Baseline 3 (2025)
Euroduplex 3UH inOUI, 3UH+ y 3UF+ OUIgo (los inOUI solo con ETCS 1): Alstom Baseline 3
T-350 SRO Haramain: Alstom FUTUR 3000
Prototipo Avril: Alstom
Prototipo Oaris: CAF Signalling
Séneca, BT 1 y 2: Alstom Baseline 3 (al menos 3.5.0)
9 (18 en 2025) locomotoras S-256 de Captrain y Transfesa:
Avril S-106: Alstom 4.13.1.8
448 449 470 450 451 463 464 465 592.0 y 599: Alstom
6 S-490:
Puesta en servicio en las diferentes líneas (anulado, actual y futuro):
2000Zaragoza-Huesca: Alstom 2.2.2+ y GSM-R (adjudicado pero no instalado)
2000 La Sagra-Toledo: Alcatel (adjudicado pero no instalado)
24/06/2004 Primer viaje de pruebas a 300 km/h con ERTMS en España
19/05/2006 Madrid-Lleida: Hitachi Rail (Ansaldo) 2.3.0.d (ex 2.2.2+)
23/12/2007 Madrid-Río Duero (Valladolid): Thales (Alcatel) 2.3.0.d (ex 2.2.2+) (y ETCS 2)
22/06/2007 Madrid-Sevilla: módulo STM de Siemens para traducir el LZB
24/12/2007 Córdoba-Málaga: Siemens (Invensys-Dimetronic) 2.3.0.d (ex 2.2.2+) (y ETCS 2)
20/02/2008 Lleida-Barcelona: Thales (Alcatel) 2.3.0.d (ex 2.2.2+)
10/01/2009 Variante de Perales (solo ETCS 2 y LZB): Hitachi Rail (Ansaldo) 2.3.0.d (ex 2.2.2+)
15/12/2010 Torrejón de Velasco-Valencia y Albacete: Siemens 2.3.0.d (y ETCS 2)
21/12/2010 Figueres-Perpiñán: Hitachi Rail (Ansaldo) 2.3.0 sin respaldo
21/12/2010 Girona Mercaderies-Vilamalla-Figueres: Alstom 2.3.0.d (Atlas)
24/10/2011 Madrid-Lleida (ETCS 2, además del N1; de baja desde 17/08/2016 hasta Baseline 3)
11/12/2011 Ourense-Santiago: Thales 2.3.0.d
01/03/2012 Cercanías Madrid C4: Siemens (Norte) y Thales (Sur) 2.3.0.d (ETCS 2 en 2022)
09/01/2013 Barcelona-Figueres Vilafant: Thales 2.3.0.d
09/05/2014 Albacete-Alicante (solo ETCS 2): Alstom 2.3.0.d (Atlas 200)
13/10/2016 Torrejón de Velasco-Valencia y Albacete (ETCS 2, además del N1) Siemens
26/06/2019 Antequera-Granada (solo ETCS 2): Siemens
26/06/2019 Córdoba-Málaga (ETCS 2, además del N1) Siemens
01/07/2019 Canal del Duero (Valladolid)-León (solo ETCS 2): Alstom 2.3.0.d (Atlas 200)
01/01/2020 Haramain entre Rabigh-KAEC y Medina (solo ETCS 2): Siemens
13/01/2020 Alcover / Perafort-cambiadores de La Boella (N1 y 2): Thales
13/01/2020 La Boella-L´Hospitalet-L’Ametlla (N1 sin GSM-R): CAF Signalling 2.3.0.d (Baseline 3 y GSM-R junto con el cambio de ancho)
27/10/2020 Olmedo-Pedralba (solo ETCS 2): Thales AlTrac
15/12/2020 Madrid-Río Duero (Valladolid) (ETCS 2, además del N1): Thales
01/02/2021 Monforte del Cid-Beniel (solo ETCS 2): Hitachi Rail (adjudicado a CAF Signalling)
31/03/2021 Haramain entre La Meca y Rabigh-KAEC (solo ETCS 2): Siemens
21/12/2021 Pedralba-Ourense (solo ETCS 2): Thales AlTrac
01/07/2022 Chamartín-Torrejón de Velasco (solo ETCS 1): Thales AlTrac
22/07/2022 Nudo de Venta de Baños-Burgos (solo ETCS 2): Alstom 3.6 (Atlas 200)
20/12/2022 Beniel-Murcia (solo ETCS 2): Hitachi Rail (adjudicado a CAF Signalling)
12/01/2023 Río Duero-Valladolid-Canal del Duero: ETCS 1 (y ETCS 2)
30/08/2023 Vigo-Coruña (N1 sin GSM-R): CAF Signalling, Alstom y Siemens
30/11/2023 Bifurcación Pajares-Pola de Lena (solo ETCS 2): Hitachi Rail
15/04/2024 Río Duero-Valladolid-Canal del Duero (ETCS 2, además del N1)
Según mis cuentas hay 3.025,8 km con ERTMS, 1.778,6 de ellos con ETCS 2 (a 31/12/2023). De acuerdo a las últimas Declaraciones sobre la Red con datos del 31/12/2021 había 2.592,6 km con ERTMS, 2.850,5 sumando las líneas de 2023.
2023 Sevilla-Cádiz (ETCS 1, hasta 03/2017 iba a ser solo Utrera-Jerez con N2); el GSM-R de Thales
2023 Rodalies R1 L’Hospitalet de Llobregat-Mataró (solo ETCS 2): Alstom (Atlas 200)
2023 Rodalies R4 NorteManresa-Sants, y R2 Sur Sants-Sant Vicenç de Calders (solo ETCS 2): Siemens
2024 Plasencia-Badajoz (solo ETCS 2): Alstom (Bombardier) Interflo 450 ENCE Alstom Smartlock 300
2024 Variante de Almodóvar: Thales
2024 Castellbisbal-Vilaseca (solo ETCS 2)
2024 Cercanías C3 Chamartín-Aranjuez: (seguramente N1) con GSM-R
2024 Cercanías R2 Barcelona L’Hospitalet de Llobregat-Port Aventura (solo ETCS 2): Alstom
2024 Bifurcación Mollet-Castellbisbal-Can Tunis (solo ETCS 2): Alstom
2025 León-Santibáñez (solo ETCS 2): Alstom
2025 L´Ametlla-Villarreal (ETCS 1) y CRC Vandellós-Valencia: Thales AlTrac
2025 Burriana-Valencia (solo ETCS 1): Alstom (Bombardier) Interflo 250
2025 Valencia-La Encina (N1 en convencional y N2 en LAV) CAF Signalling (GSM-R de Thales)
2025 Madrid-Córdoba y Toledo (solo ETCS 2): Thales
2026 Córdoba-Sevilla (solo ETCS 2): Thales
202? Valencia-Almussafes: (ETCS 1)
202? Murcia-Almería: (ETCS 2)
202? Cercanías C5 Móstoles-Atocha-Humanes (ahora con LZB)
Versiones de software y estándares
Las primeras especificaciones técnicas del ERTMS (System Requirements Specification, SRS, Subset-026) tuvieron lugar en el 2000. Puesto que es un sistema abierto a los fabricantes (para abaratar su coste), a lo largo de los años la UE fue estableciendo varios estándares comunes para todos los softwares, cada uno de ellos es conocido como Baseline, o base de referencia.
El problema es que inicialmente hubo hasta cinco versiones de software SRS con proyectos comerciales ya en servicio. La versión 2.2.2 entregada por Eurosig (industria europea de señalización) al principio del proceso de consolidación, contenía cientos de las llamadas “decisiones del diseñador” (Designer Choices). Estas “decisiones” eran requisitos que no afectaban a la interoperabilidad y que -por lo tanto- era una decisión libre del diseñador el incluirlas o no en su diseño del equipo embarcado. Pero esta alternativa introdujo una gran incertidumbre en el proceso de certificación.
El último estándar de software es la Baseline 3 Release 2 (B3R2), entre sus características figura una curva de frenado universal, que simplificará el despliegue de los equipos ETCS de a bordo.
Equipos embarcados: B2 > B2+CR2 > B3MR1 > B3MR1+CR2 > B3R2 > B3R2+CR2 > B3R2+Art10SP
Equipos en vía: B2 (2.0.0>2.2.2>2.3.0>2.3.0.d ) > B3 (3.3.0) > B3MR1 (3.4.0) > B3R2 (3.6.0)
Año de inicio: 2.0.0 (2000) > 2.2.2 (2002) > 2.3.0 (2007) > 2.3.0.d (2008) > 3.3.0 (2012) > 3.4.0 (2014) > 3.6.0 (2016) > 3.6.0+Art10SP (2017)
Notas:
B3MR1: Baseline 3 Maintenance Release 1
B3R2+Art10SP: Baseline 3 Release 2 Artículo 10 Service Pack. El artículo 10 del Reglamento UE 2016/919 trata sobre la evaluación de errores en la compatibilidad de las peticiones de cambio (CR, Change Request) de las nuevas versiones, y dice que, cuando se detecte un error, la Agencia (a través del Grupo de Gestión del Control de Cambios: CCM) publicará tan pronto como sea posible las soluciones para corregirlos, y evaluará su impacto en la compatibilidad y estabilidad de las versiones existentes.
Toda esta cantidad de fabricantes y de versiones de software hace que la conducción con ERTMS sea mucho más compleja de lo que debería. Por ejemplo, las transiciones entre sistemas (con el LZB, e incluso entre nivel 1 y 2) en algunas series hay que hacerlas con el tren detenido ¡Un TAV detenido por parada técnica! Más ejemplos: ante la misma avería (bueno, ni eso: incoherencia de balizas) la actuación del maquinista varía según la serie del tren:
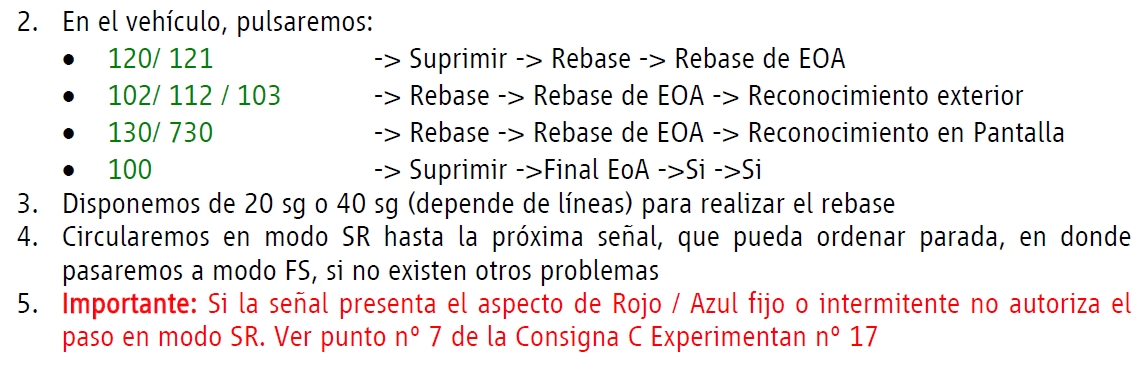
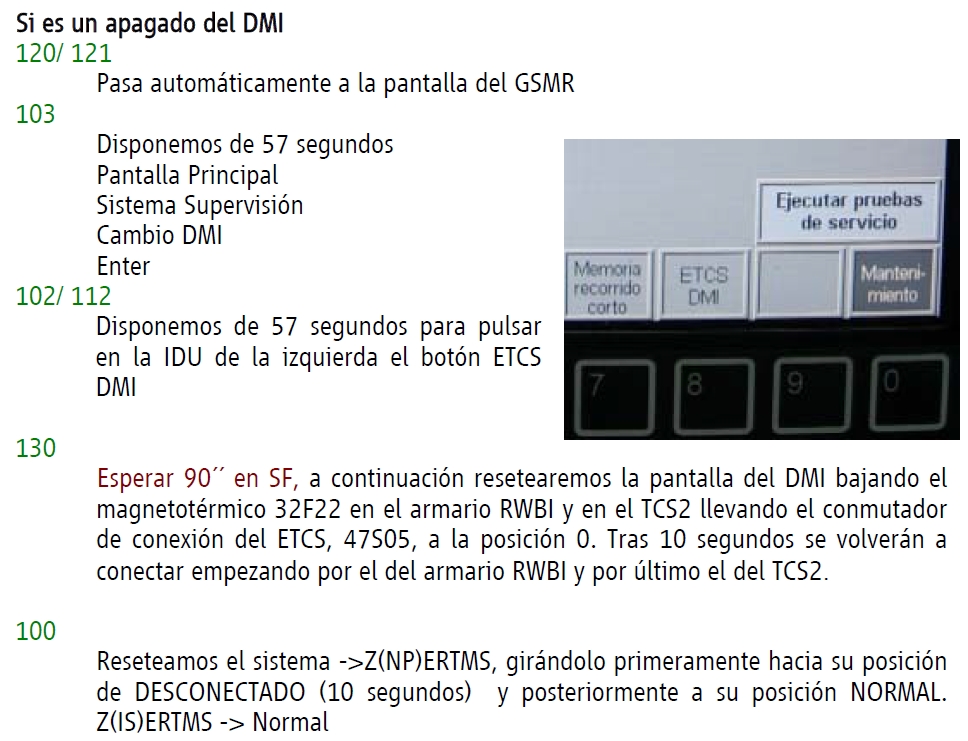
Otro más: hay que explicar cómo se sabe que hay un Trip (TR, Detención Automática: por actuación anómala del maquinista o del sistema) según cada instalador. Siemens indica: «debido a Train Trip», Ansaldo «TR», Alstom y Bombardier ponen simbolitos y, por supuesto, la vuelta al estado normal necesita distintos procedimientos.
Si se apaga el DMI, en una serie se dispone de 57 segundos para pulsar la secuencia, mientras que en otra hay que esperar 90 segundos.
Está muy bien que sea un sistema abierto para abaratar su coste, pero también se debe exigir a los fabricantes que los procedimientos se realicen de forma -al menos- similar.
Hay que tener en cuenta que un mismo maquinista está habilitado para varias series y puede haber estado sin conducir la de hoy hasta hace 365 días ¡Qué bien van a estar los maquinistas de las operadoras alternativas (privado solo es el 55% de una) con solo una serie!

¡Muchas gracias Gusiluz por el enrome trabajo que has hecho para hacernos entender a los que no sabemos mucho como funciona de forma más precisa el ERTMS! Pero hay una cosa que no entiendo, ¿como es posible que si el S102/112 puedan circular por LAV Levante y el S-103 no pueda? Si cuentan con el mismo software en el equipo embarcado…que raro. No sé si me lo podrías explicar…te lo agradecería mucho. Y luego, ¿Se ha instalado ERTMS sólo en las 446 madrileñas sin LZB? y ¿sólo hay 123 S-465 con ERTMS? En Madrid hay 112 de ellas con ERTMS desde hace muchos años, entonces significa que las otras 11 son en las que se ha instalado son las 465 catalanas, no?
¡No hay de qué!
Bueno, para «no saber», bien que sabes lo de los S-103. La lista de SRS tiene ya tiempo y no está actualizada, quizás los Talgo ya han cambiado al 2.3.0 pero la verdad es que lo desconozco.
Tampoco está actualizada la lista de los equipos ETCS instalados, sé que al menos había 11 en Barcelona, pero desconozco cómo estará en la actualidad, cuando van a poner en servicio el ETCS 2 en breve.
¡Gracias por el interés!